OpenCV
OpenCV is an open source computer vision and machine learning software library. It is available for several common programming languages, most notably C++, Python and Javascript. The main documentation is available at
You'll quickly come across the term cascades. Cascades are pre-trained functions that programmers can use to detect commonly sought after features such as faces, eyes, ears, full bodies etc.
To find a cascade that suits your project, try the following github repo's:
- https://github.com/opencv/opencv/tree/master/data/haarcascades
- https://github.com/opencv/opencv_contrib/tree/master/modules/face/data/cascades
VisionMadeEasy
To help beginner programmers get up and running even quicker, I've created a Python library called VisionMadeEasy that is available for install from the Python package repository. Either use PyCharm or pip to install as follows.
pip install visionmadeeasy
To successfully run the demo, you will also have to...
- Download a cascade file such as
haarcascade_frontalface_default.xmlfrom https://github.com/opencv/opencv/tree/master/data/haarcascades and save it into your project folder - Create a sub-folder called "datasets" in your project folder. This is where it will store your training photos.
- Make sure you have a web camera attached :-)
The demo code follows:
import visionmadeeasy
def i_see_a_face( location, img ):
print(f"I see a face!!! It is at {location['x']},{location['y']}")
return True # must return True to keep the loop alive
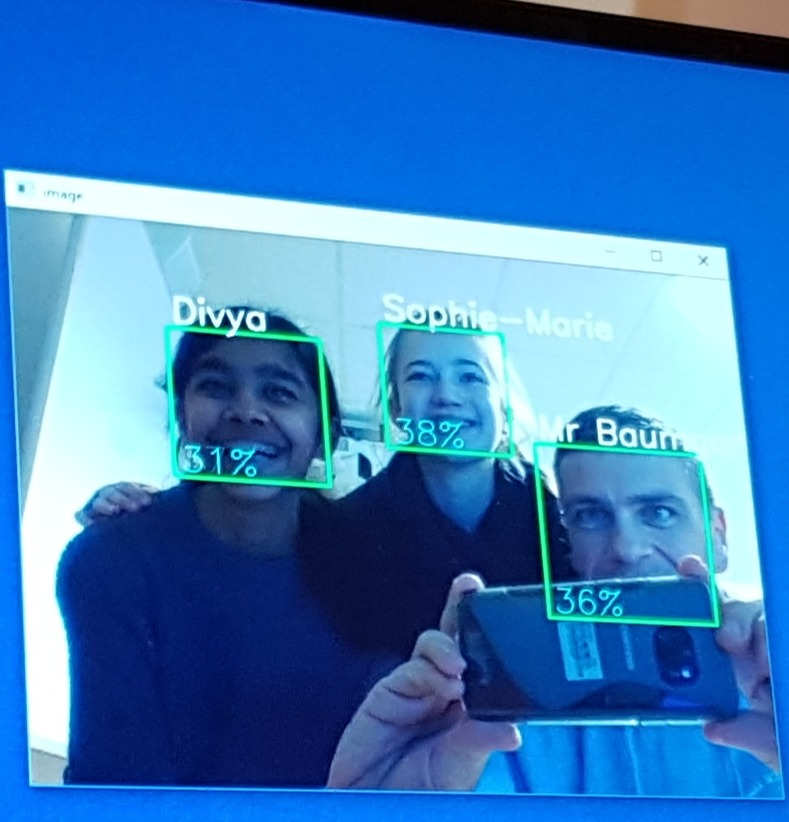
def i_recognise_a_face( location, person_name, confidence, img ):
print(f"Hello {person_name}! I am {confidence}% sure it is you :-)")
return True # must return True to keep the loop alive
if __name__ == "__main__":
vme = visionmadeeasy.VisionMadeEasy(0, "dataset")
quit = False
while not quit:
print("Demonstration time! Menu of options...")
print("1. Detect faces")
print("2. Record faces")
print("3. Train for faces recorded")
print("4. Recognise faces (must do training first)")
print("5. Exit")
choice = int(input("Enter your option (1 to 5):"))
if choice == 1:
print("[face_vision] Task: Searching for faces.\nLook at the camera! (press ESC to quit)")
# Demo of detecting faces
vme.detect_face(i_see_a_face)
elif choice == 2:
print("About to save 50 images of different angles etc of a person, saving to folder ./dataset")
id = int(input("Enter unique person number: "))
n = input("Enter person name: ")
print("Smile! :-)")
# Demo of recording faces
vme.record_face_dataset(images_to_record=50, interval=1, person_identifier=id, person_name=n)
elif choice == 3:
print("[face_vision] Task: Training... please wait...")
# Demo of training faces
vme.train_from_faces()
elif choice == 4:
print("[face_vision] Task: Searching for faces I recognise.\nLook at the camera! (press ESC to quit)")
# Demo of recognising faces
vme.recognise_face(i_recognise_a_face)
elif choice == 5:
quit = True
print("Goodbye!")
Automated photo booth
Those who attended the February 2019 middle school disco would be aware I had my laptop running an automated photo booth that was taking photos when it detected at least 3 people standing in front of it. I thought I might share the code for those who are interested.
from PIL import Image
import cv2 # use opencv-contrib-python rather than opencv-python
import os, sys, time, math
import requests
class Vision():
def __init__(self, camera_device_id=0, images_folder=".", cascade_file="haarcascade_frontalface_default.xml" ):
self.camera_device_id=camera_device_id
self.images_folder = images_folder
if not os.path.exists(images_folder):
exit("[SimpleVision] ERROR: images folder not found: "+images_folder)
self.cascade_file = cascade_file
if not os.path.exists(cascade_file):
exit("[SimpleVision] ERROR: cascade file not found: "+cascade_file)
self.cascade = cv2.CascadeClassifier(cascade_file)
self.flip = False
self.camera_width = 1280
self.camera_height = 720
self.min_detect_width = 70
self.min_detect_height = 70
self.mode = "scanning"
self.wait_until = 0
self.countdown_to = 0
self.last_seen = []
def set_camera_device(self, camera_device_id):
""" Set the camera id number (default: 0) """
self.camera_device_id=camera_device_id
def set_camera_resolution(self, width, height):
if isinstance(width, int) and isinstance(height, int) and width > 0 and width <= 4096 and height > 0 and height <= 4096:
self.camera_width = width
self.camera_height = height
def set_flip(self, flip ):
""" Set to true to vertically flip the image from the camera (usually required for Raspberry Pi) """
if isinstance(flip, bool):
self.flip = flip
else:
self.flip = False
### Internal/private functions
def __get_camera(self):
# cv2.namedWindow("preview") # Mac
cap = cv2.VideoCapture(self.camera_device_id)
cap.set(3, self.camera_width)
cap.set(4, self.camera_height)
return cap
### Public functions
def detect_face(self, callback ):
cap = self.__get_camera()
loop = True # loop can be stopped by the callback function
while loop:
# Read image from the camera
ret, img = cap.read()
assert ret, "Error reading from capture device "+str(self.camera_device_id)
if self.flip:
img = cv2.flip(img, -1)
if self.mode == "scanning" or self.mode=="wait a bit":
# Convert image to grey scale
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Detect any faces in the image? Put in an array
faces = self.cascade.detectMultiScale(
gray,
scaleFactor=1.2,
minNeighbors=5,
minSize=(self.min_detect_width, self.min_detect_height)
)
# For every face we found
for (x,y,w,h) in faces:
# Draw a rectangle around the face
color = (0,255,255) # Yellow
if self.mode == "wait a bit":
color = (0,0,255) # Red
elif len(faces) >= 3:
color = (0,255,0) # Green
cv2.rectangle(img,(x,y),(x+w,y+h),color,2)
if self.mode == "wait a bit":
if self.wait_until < time.time():
self.mode = "scanning"
elif self.mode == "scanning":
if (len(faces) >= 3) and (callback is not None):
# I see three faces.
self.last_seen.append(int(time.time())) # add timestamp to occassions that 3 faces have been seen
for item in self.last_seen:
if item < int(time.time()-2.0):
self.last_seen.remove(item)
# print(self.mode,self.last_seen)
# Have I seen 3 faces at least 10 times in the last two seconds?
if len(self.last_seen) > 4:
self.mode = "photo"
self.countdown_to = time.time()+6
elif self.mode == "photo":
time_remaining = math.trunc(self.countdown_to-time.time())
msg = str( time_remaining )
if time_remaining > 0:
cv2.putText(img, msg, (450,400), cv2.FONT_HERSHEY_SIMPLEX, 15, (0,255,255), 15)
elif time_remaining == 0:
print(self.mode,"Taking photo!")
ret, img = cap.read()
if self.flip:
img = cv2.flip(img, -1)
loop = callback(faces, img)
cv2.imshow('video',img)
self.mode = "wait a bit"
k = cv2.waitKey(30) & 0xff
time.sleep(3)
self.wait_until = time.time() + 5
cv2.imshow('video',img)
# Check for exit key press
k = cv2.waitKey(30) & 0xff
if k == 27: # press 'ESC' to quit
break
cap.release()
cv2.destroyAllWindows()
return img
def convert_cv2_to_pil( cv2_image ):
import cv2
from PIL import Image
cv2_image_rgb = cv2.cvtColor(cv2_image, cv2.COLOR_BGR2RGB)
pil_image = Image.fromarray(cv2_image_rgb)
return pil_image
def convert_pil_to_cv2( pil_image ):
import cv2
import numpy as np
from PIL import Image
cv2_image = cv2.cvtColor(np.array(pil_image), cv2.COLOR_RGB2BGR)
return cv2_image
def http_upload( url, local_filename ):
files = {"file": open(local_filename, "rb")}
r = requests.post(url, files=files)
print(r)
def save_photo( location, image ):
photo = convert_cv2_to_pil(image)
filename = "full_photos/"+str(int(time.time())) + ".jpg"
photo.save(filename)
http_upload("http://www.cs.isl.ch:10004/photo/"+str(int(time.time())) + ".jpg", filename)
return True # must return True to keep the loop alive
if __name__ == "__main__":
v = Vision(0, "dataset")
v.set_camera_resolution(1920, 1080)
v.set_flip(True)
v.detect_face(save_photo)
print("Goodbye!")